Industrial Impacts
- + Our motion sensing technology has been commercialized by Origin Wireless Inc. and has been deployed over 150 countries worldwide as Belkin's Linksys Aware, the first-of-its-kind motion sensing in mesh WiFi for home security.
- Awards won by LinkSys Aware: CES 2020 Innovation Award, Best in Session 2020 by M3, Best of CES 2020 by Newsweek.
- + Our work on wireless indoor tracking is being commercialized by Origin Wireless Inc.
- + Our work on contactless sleep monitoring is being commercialized by Origin Wireless Inc.
- + Authored 20+ China patents and 20+ US/international patents.
RIM: RF-based Inertial Measurement
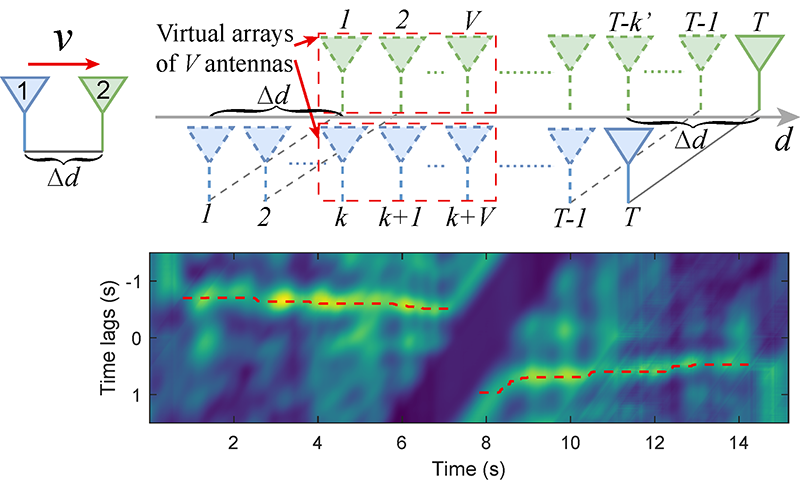
Inertial measurements are critical to almost any mobile applications. It is usually achieved by dedicated sensors (e.g., accelerometer, gyroscope) that suffer from significant accumulative errors. We presents RIM, an RF-based Inertial Measurement system for precise motion processing. RIM turns a commodity WiFi device into an Inertial Measurement Unit (IMU) that can accurately track moving distance, heading direction, and rotating angle, requiring no additional infrastructure but a single arbitrarily placed Access Point (AP) whose location is unknown. Our experiments, over a multipath rich area of >1,000 m2 with one single AP, show that RIM achieves a median error in moving distance of 2.3 cm and 8.4 cm for short-range and long-distance tracking respectively, and 6.1◦ mean error in heading direction. As far as we are aware of, despite of numerous efforts in WiFi-based tracking, RIM is the first attempt to achieve inertial estimation using RF signals. With the promising performance, RIM would upend the way inertial measurement traditionally has been practiced, and opens up WiFi-based motion sensing to a range of new applications demanding accurate and reliable motion measurements, such as indoor tracking, handwriting, and mobile gaming, etc.
Checkout more on our project website...
Publications:
"RF-based Inertial Measurement", ACM SIGCOMM 2019. [PDF]
"Indoor Heading Direction Estimation Using RF Signals", IEEE ICASSP 2020. [PDF]
EasiTrack: Accurate Indoor Tracking Made Easy and Scalable
Ideally, an Indoor Positioning System (IPS) should satisfy the below requirements to achieve a ubiquitous "Indoor GPS": low(zero)-cost, scalable, accurate, easy-to-deploy, large coverage.
Existing solutions, however, do not easily scale with low cost while maintaining high accuracy. For example, the mainstream triangulation-based systems degrade drastically under NLOS conditions and require extremely precise installation of multiple APs, while fingerprint-based methods suffer from low accuracy in practice.
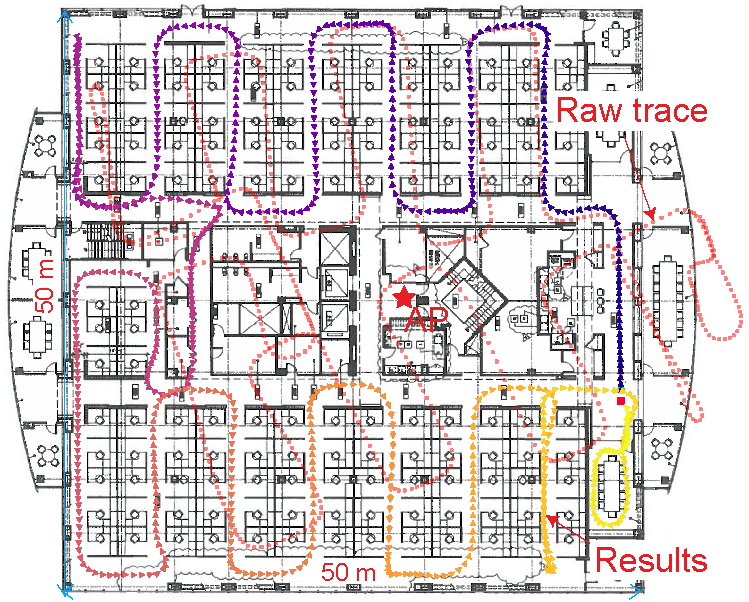
We design EasiTrack, an indoor real-time tracking system that achieves decimeter accuracy using a single unknown commodity WiFi AP under both LOS and NLOS conditions and scales to massive buildings and unlimited number of clients with (almost) zero cost.
Despite over three decades of research, enabling such capabilities in one system has been regarded as challenging, and we are unaware of any prior IPS works by which the same would have been achieved.
We believe EasiTrack sets the stage for a ubiquitous IPS solution for world-wide deployment, and we are currently commercializing it with Origin Wireless Inc. So far, we have demonstrated our system in the headquarters of many big tech companies, including Apple, HP, Qualcomm, Marvell, Murata, etc., and at CES 2019.
Checkout more on our project website...
Publication: "EasiTrack: Decimeter-Level Indoor Tracking with Graph-based Particle Filtering", IEEE IOT Journal, 2019. [PDF]
Widar: Passive Tracking and Gesture Recognition using Commodity WiFi
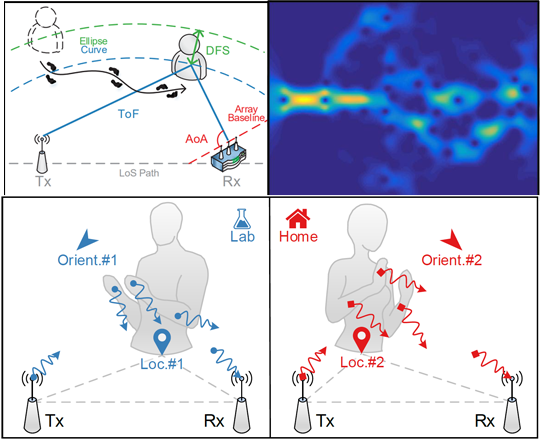
Widar project aims at enabling wireless, contactless, and sensorless sensing by reusing existing commodity WiFi infrastructure. We are particularly interested in estimating channel parameters such as Doppler frequency shifts, Angle-of-Arrival, etc from Channel State Information for applications like passive human tracking (MobiHoc'17, MobiSys'18), gesture recognition (MobiSys'19), etc.
The dataset of Widar3.0 has been released to the public, which, as far as we are aware, is so far the largest dataset in the community. More details on the [project website]
Publications:
"Widar3.0: Zero-Effort Cross-Domain Gesture Recognition With Wi-Fi", ACM MobiSys 2019. [PDF]
"Widar2.0: Passive Human Tracking with a Single Wi-Fi Link", ACM MobiSys 2018. [PDF]
"Widar: Decimeter-Level Passive Tracking via Velocity Monitoring with Commodity Wi-Fi", ACM MobiHoc 2017. [PDF]
"WiDance: Inferring Motion Direction using Commodity Wi-Fi for Interactive Exergames", ACM CHI 2017 (Best Paper Honorable Mention Award). [PDF]
SMARS: Sleep Monitoring using Ambient Radio Signals
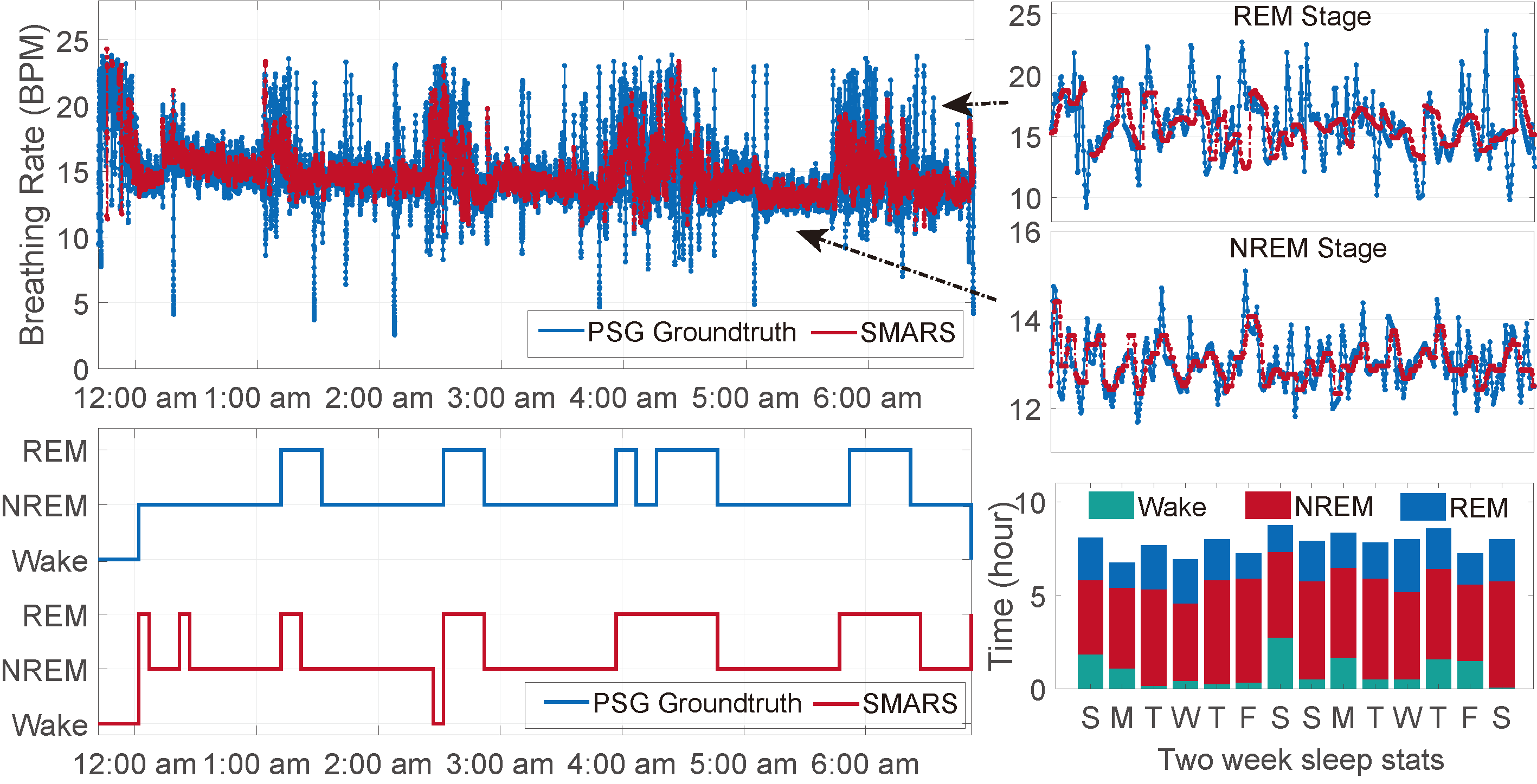
SMARS presents the first practical Sleep Monitoring system that exploits Ambient Radio Signals to recognize sleep stages and assess sleep quality. This will enable a future smart home that monitors daily sleep in a ubiquitous, non-invasive and contactless manner, without instrumenting the subject’s body or the bed.
By truly leveraging multipaths, SMARS achieves highly accurate and instantaneous breathing estimation with best-ever performance achieved on commodity WiFi. On this basis, SMARS then recognizes different sleep stages, including wake, rapid eye movement (REM), and non-REM (NREM), which was previously only possible with dedicated hardware.
Real-world deployment shows SMARS yields a median absolute error of 0.47 bpm and a 95%-tile error of only 2.92 bpm for breathing estimation, and detects breathing robustly even when a person is 10m away from the link, or behind a wall, leading to sleep staging accuracy of 88%, outperforming solutions using contact sensor or UWB radar.
Publications:
"SMARS: Sleep Monitoring using Ambient Radio Signals", IEEE Transactions on Mobile Computing, 2019. [PDF]
"VIMO: Vital Sign Monitoring Using Commodity Millimeter Wave Radio", IEEE ICASSP, 2020. [PDF]
"Respiration Tracking for People Counting and Recognition", IEEE Internet of Things Journal, 2020. [PDF]
Hidden Screen-Camera Communication System
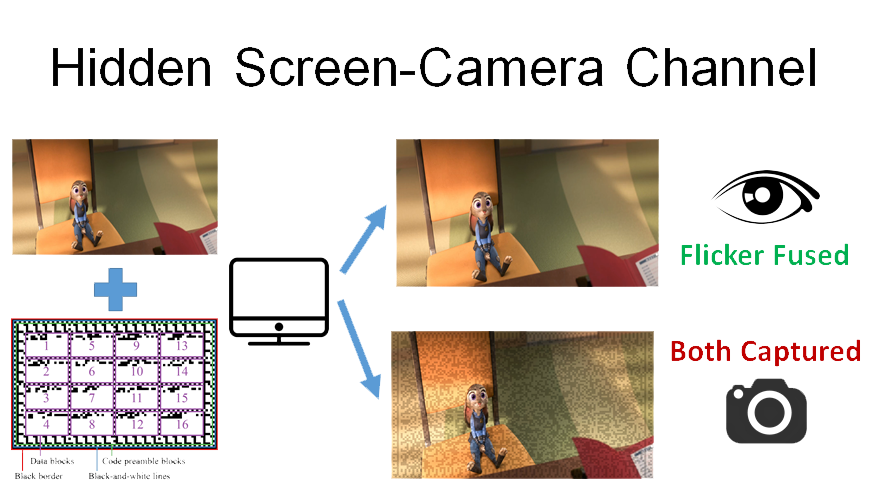
Every day, billions of videos are generated, broadcast, and watched over electronic visual displays such as phone or tablet screens, computer monitors, TVs, and electronic advertising boards. As digital marketing evolves, people continue to see trends favoring video, especially in the era of mobile Internet. Today such videos are mainly for viewing only, but we look forward to an emerging paradigm of simultaneous viewing and communication with great demands to allow movie audiences to refer to a website for more contents, TV programs to convey interactive information, and advertisers to provide extra details for an advertising video, all during watching.
In this project, we investigate hidden screen-camera communication systems that are a fully-imperceptible, high-rate, and reliable screen-camera channel to deliver the new paradigm.
Publications:
"ChromaCode: A Fully Imperceptible Screen-Camera Communication System", ACM MobiCom 2018. [PDF]
Peer-to-Peer Indoor Navigation
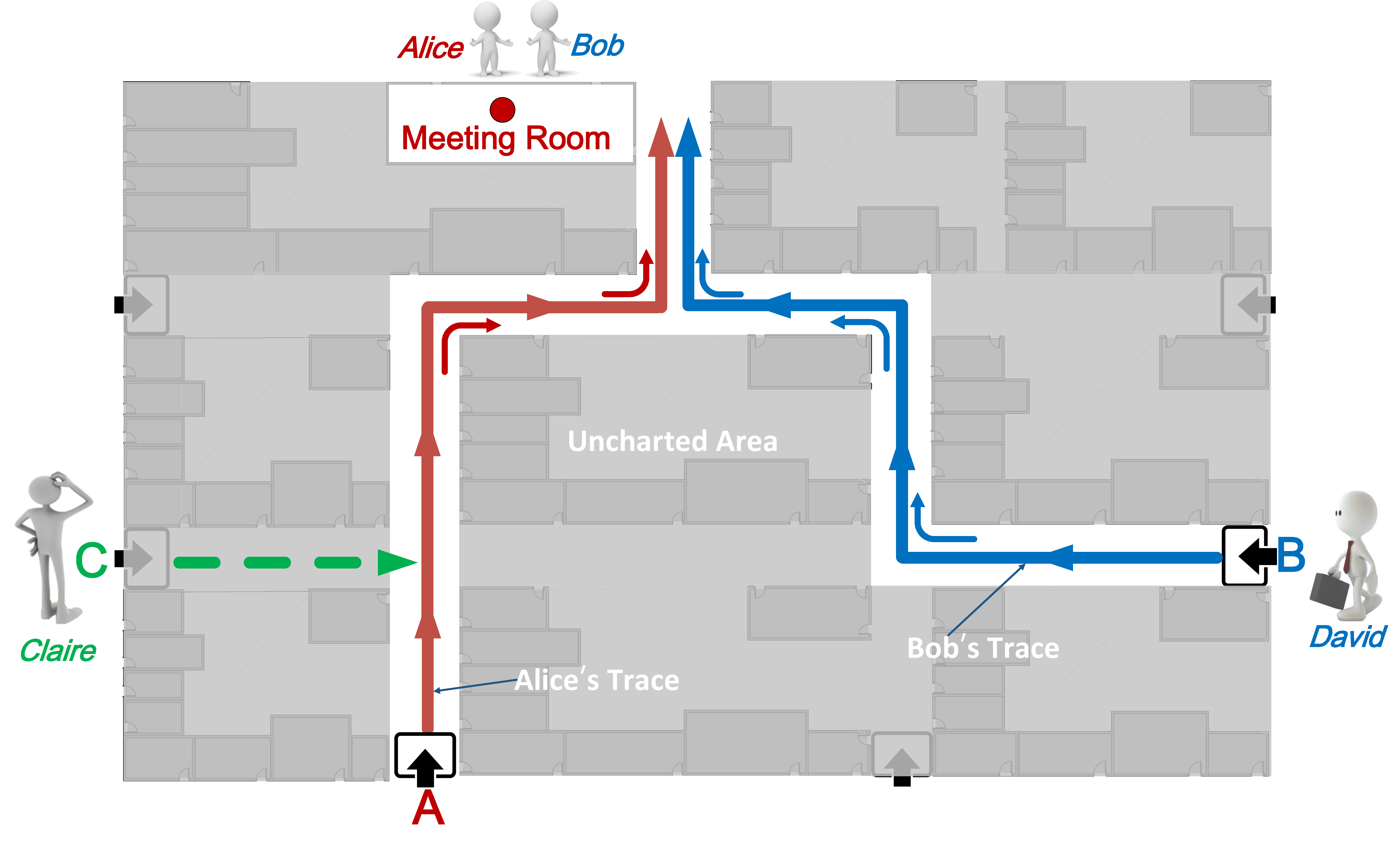
In everyday life, users urge for effective navigation in many scenarios. For example, a shop owner would like to deploy a self-owned navigation service to direct a customer to his shop. In contrast, a customer also demands for a navigation service to visit a specific shop in gigantic malls. A meeting coordinator would like to guide other participants smoothly all the way to the gathering place. Most of previous navigation relying on pre-installed location services and knowledge of indoor maps, which are frequently unavailable, are inadequate for such scenarios.
We attempt to develop an alternative model that circumvents the above needs. Our key idea is to leverage the experience of previous travellers. Specifically, we collect specific trace data from previous travellers (leaders) and extract appropriate walking hints to navigate others (followers). We term such self-deployable model as Peer-to-Peer (P2P) navigation, which does not necessarily rely on pre-deployed services and is very different from most conventional localization and navigation systems that work in a client/server mode.
In this research, we have investigated both WiFi signals (JSAC'17) and Visual SLAM (INFOCOM'19) to deliver such P2P navigation systems.
Publications:
"Pair-Navi: Peer-to-Peer Indoor Navigation with Mobile Visual SLAM", IEEE INFOCOM 2019. [PDF]
"Peer-to-Peer Indoor Navigation using Smartphones", IEEE JSAC 2017. [PDF]
Wireless Indoor Localization via Mobile Crowdsourcing

This research aims to tackle the long-standing challenges in WiFi fingerprint-based smartphone localization, such as high deployment costs due to site survey, high maintenance efforts due to environmental dynamics, and large location errors due to fingerprint ambiguity.
We design algorithms by leveraging mobile crowdsourcing to boost the deployment (MobiCom'12), facilitate the maintenance (INFOCOM'15), and enhance the accuracy (UbiComp'17), making indoor localization available, sustainable, and reliable.
The ultimate goal is to shape aWiFi fingerprint-based technology for ubiquitous scenarios, allowing it to be easily deployable over world-wide buildings, and be accurate over long-term running.
Publications:
"Gain Without Pain: Accurate WiFi-based Localization with Fingerprint Spatial Gradient", ACM UbiComp 2017. [PDF]
"Automatic Radio Map Adaptation for Indoor Localization using Smartphones", IEEE Transactions on Mobile Computing, 2018. [PDF]
"Static Power of Mobile Devices: Self-updating Radio Maps for Wireless Indoor Localization", IEEE INFOCOM 2015. [PDF]
"Smartphones based Crowdsourcing for Indoor Localization", IEEE Transactions on Mobile Computing, 2015. [PDF]
"Locating in Fingerprint Space: Wireless Indoor Localization with Little Human Intervention", ACM MobiCom 2012. [PDF]
"WILL: Wireless Indoor Localization Without Site Survey", IEEE INFOCOM 2012. [PDF]
